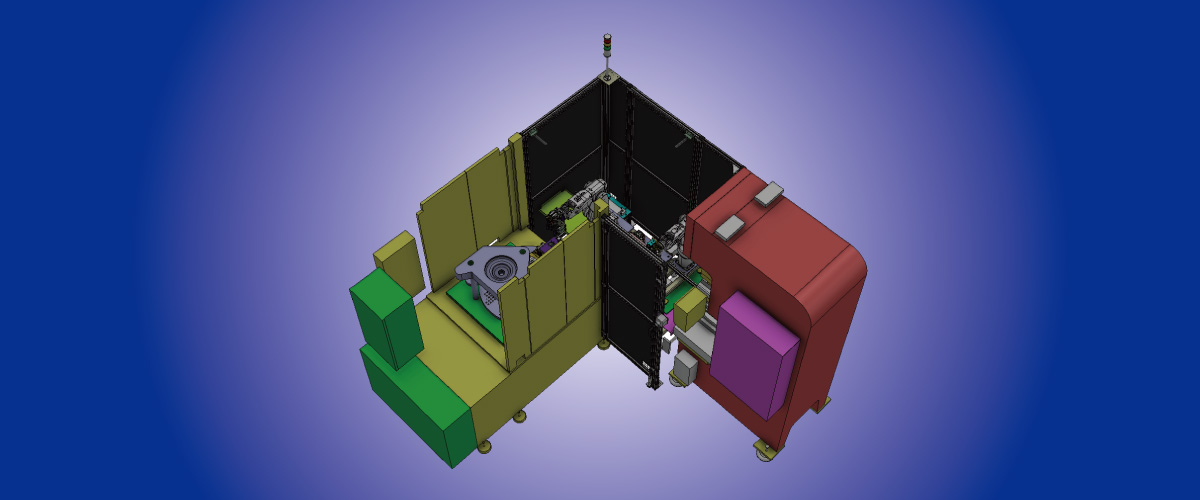
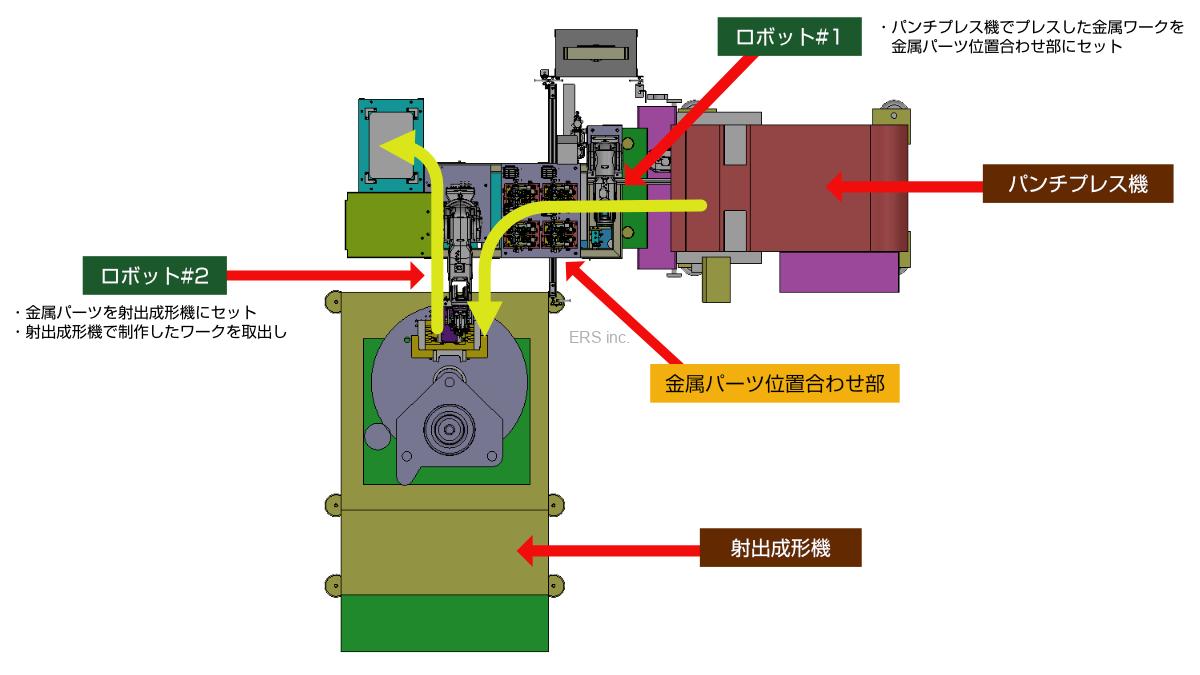
本装置はパンチ・成形プレスに各1台ロボットを設置し、インサート成形を自動化する装置です。順送プレスのパンチ型で打ち抜いた金属パーツを受け渡し部でまとめてインサート成形に運び、成形後の製品を取り出します。
- プレス工程(ロボット#1のハンドで金属パーツをつかみ、位置合わせ部にセットします)
- 成形への受け渡し工程(ロボット#2のハンドは2つの金属パーツを同時に吸着ガイドで吸着し、押しガイドで金属パーツを曲げる作業を実現するダブルハンド構造です)
- 成形工程(ロボット#2は樹脂成形後のワークとゲート棒を同時にハンドチャックし、取り出します)
ポイント
- ロボットが複雑な作業を自動化・省力化します
- 正確な作業で品質向上、および安定化を実現します
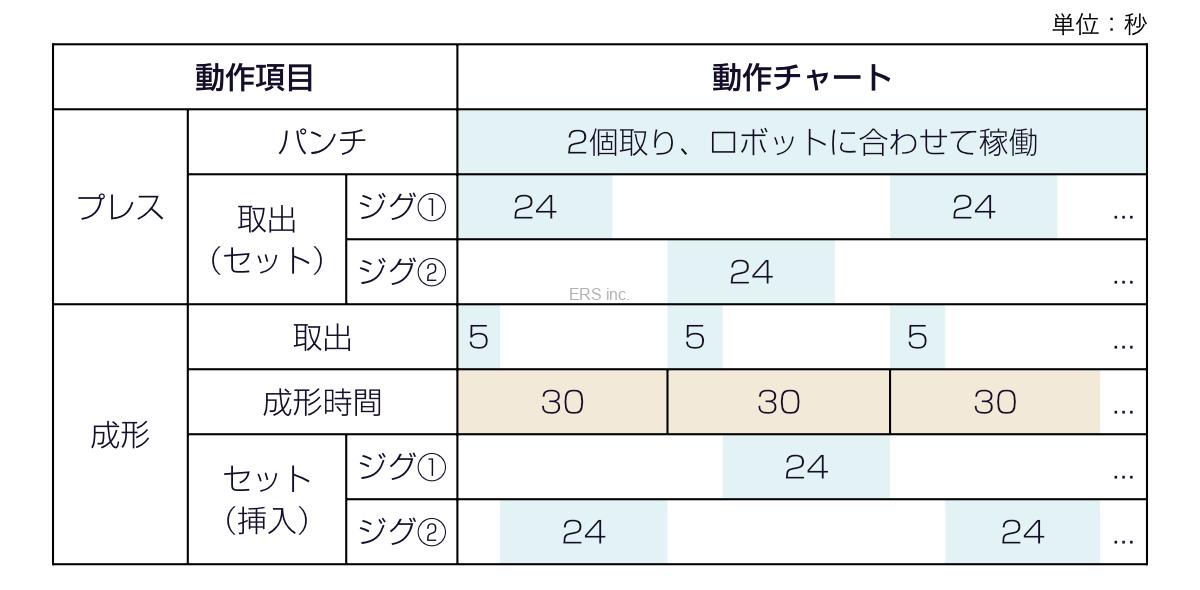
- 正確なタクトタイムを実現します
- IoT機能の付加で稼働管理、原価管理が可能になります(オプション)
システム構成図
ワークフロー
※動作イメージを動画で確認できます
主な仕様
詳細仕様については当製品カタログをダウンロードの上、ご確認ください。
製品カタログのダウンロード
当製品カタログをご希望の方は、必要事項をご入力の上 [送信]ボタンを押してください。
ご指定のメールアドレスにダウンロードURLをお送りします。