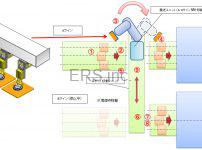
バラ積みワークを整列させ、センサーにより表裏判別。反転ユニットで反転、ワークをロボットでハンドリングします。
特長
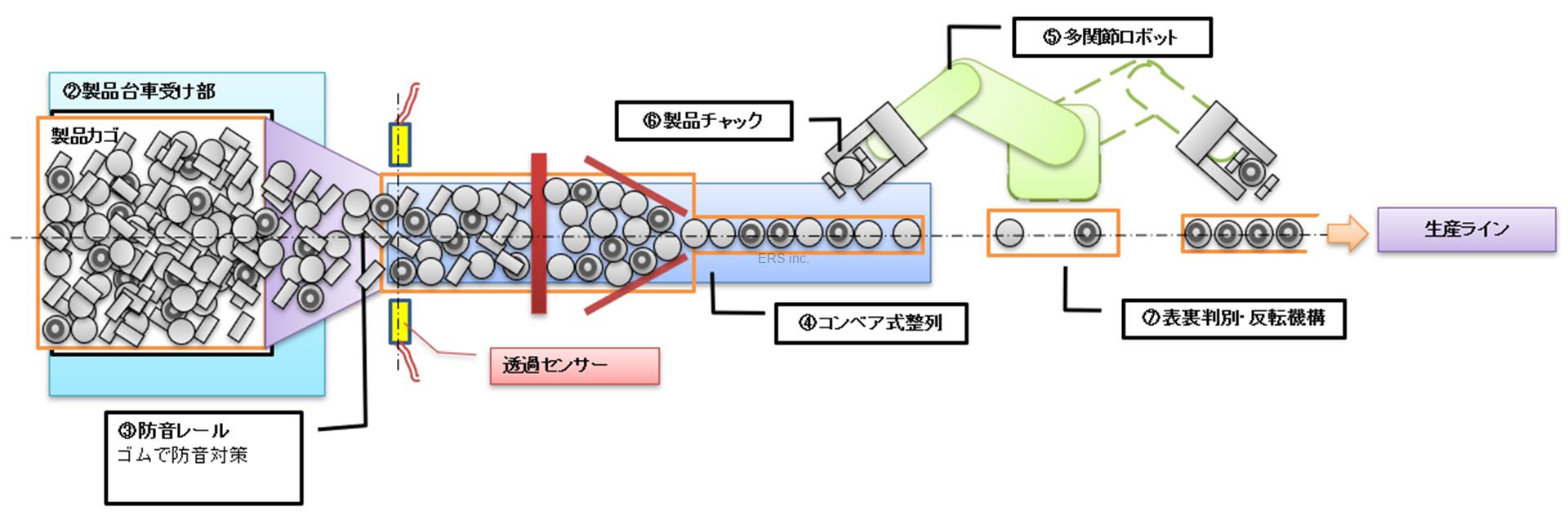
ワーク搬送ユニットにより自動供給、供給量を調整し、表裏判別・反転ユニットをラインに組み込む事により、ロボットの搬送の効率化の改善と次の生産ラインにつなげられる。
構成ユニット
| ユニット名 | 個数 | 備考 |
| ①製品運搬台車 | 2 | モータ上下 |
| ②製品台車受け部 | 1 | 100V専用コンセント |
| ③防音レール | 1 | |
| ④コンベアー式整列 | 1 | 幅可変 |
| ⑤多関節ロボット | 1 | |
| ⑥製品チャック | 2 | 2機種分 |
| ⑦表裏判別・反転 | 1 | |
| ⑧制御BOX | 1 | |
| ⑨操作パネル | 1 | |
| ⑩安全柵 | 1 | ロボット回り |
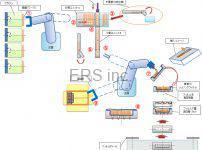
動作フロー
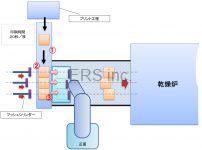
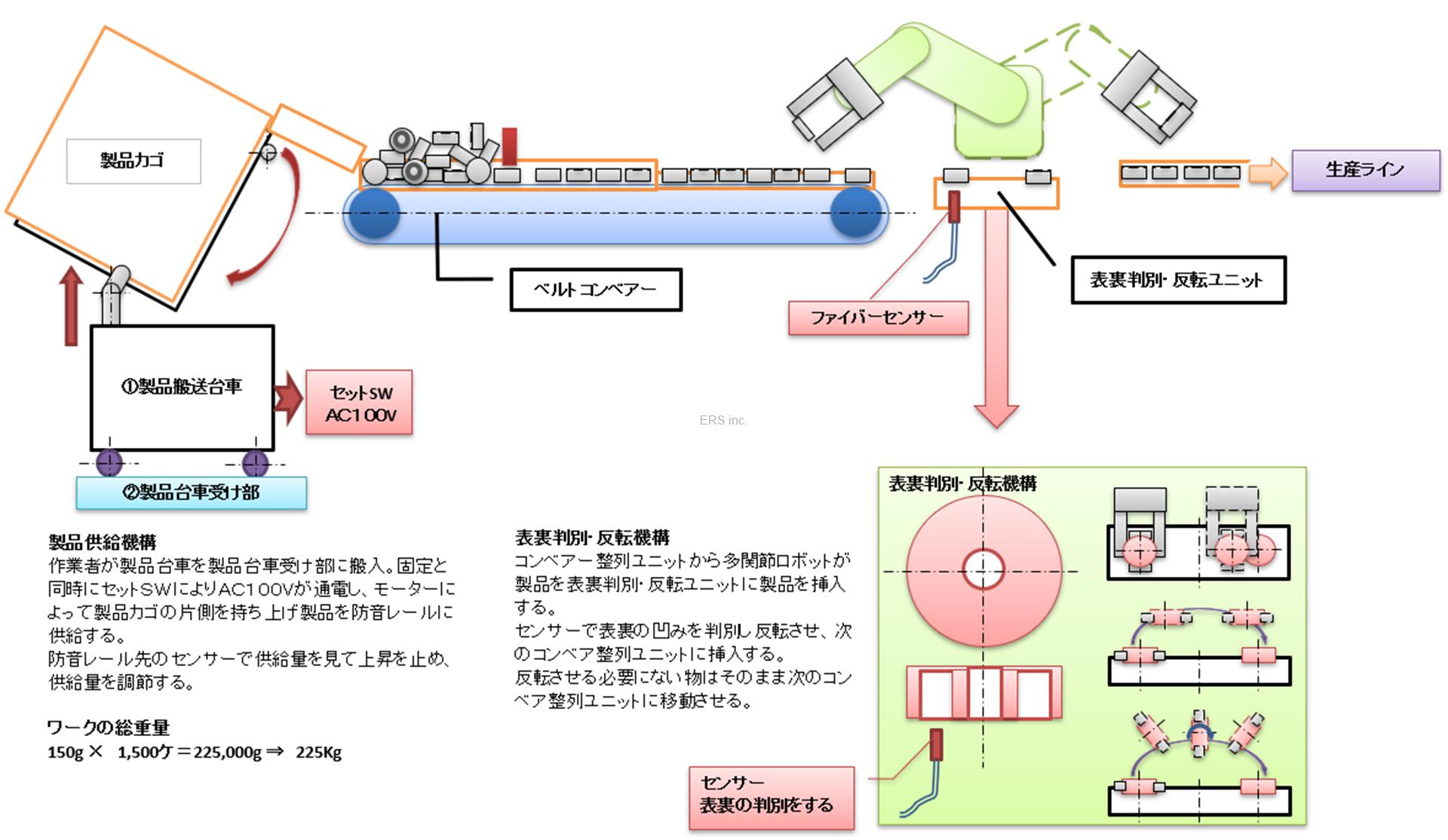
- 製品台車を受け部に入れ、セットSWで固定する。固定するのと同時にAC100Vも供給される
- 製品カゴの片側を持ち上げて製品を供給する。センサーで供給量を見て上昇を止める
- コンベアー整列ユニット製品を1個づつに分離する。コンベアーは、供給量に合わせてON?OFFする
- 多関節ロボットで表裏判別・反転ユニットに製品を挿入する
- 表裏判別・反転ユニットでセンサーで表裏判別し反転させる。反転させる必要にない物はそのまま移動させる
- 多関節ロボットで生産ラインに供給する
納期目安
- 受注後:2.5ヶ月~