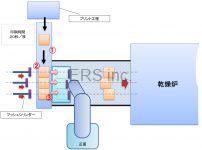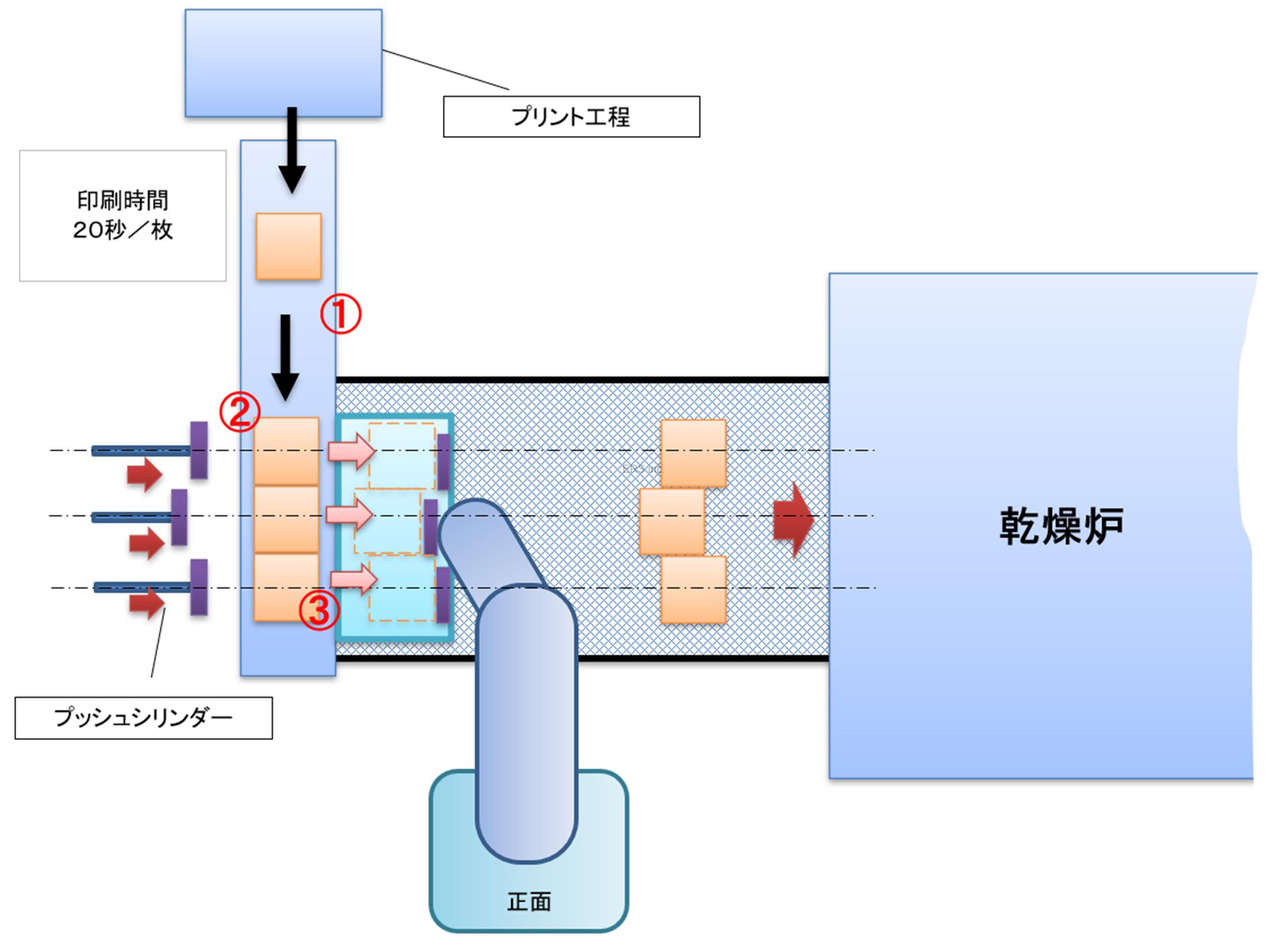
プリント工程から搬送される基板を乾燥炉への搬送ラインに位置、タイミングをずらして搬送するシステムです。
特徴
- プッシャーの押し出しでタイミング調整が可能
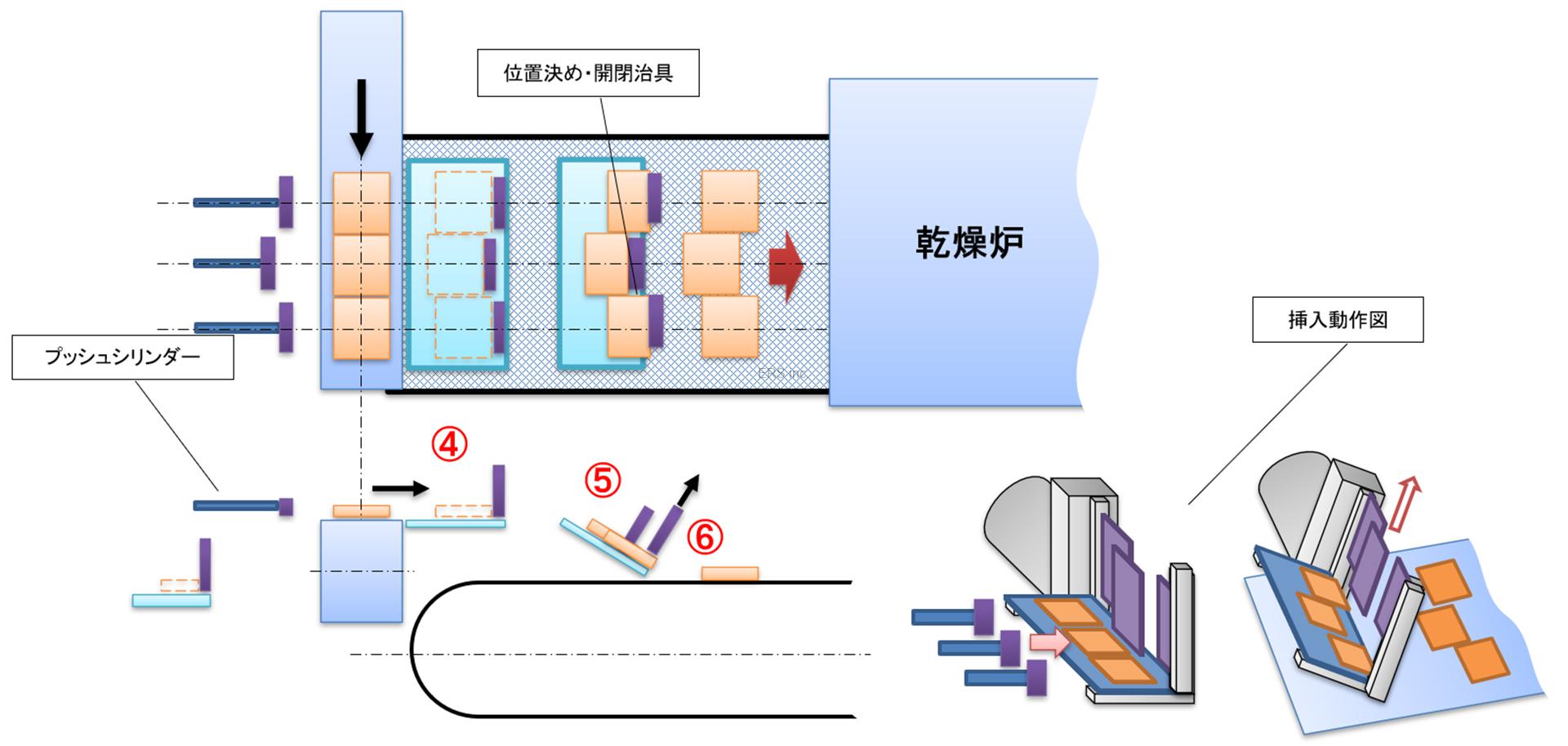
- チャック部(受け台の治具)により位置決めが可能
- 受け台の背面が開く事によりそのままの位置でラインに送り込みが可能
構成ユニット
| ユニット名 | 個数 | 備考 |
| ロボット | 1 | |
| 筐体(ロボット台) | 1 | |
| ロボットハンド搬送チャック | 1 | |
| 制御ボックス | 1 | |
| 制御パネル | 1 | |
| 安全策 | 1 |
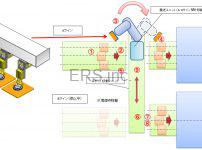
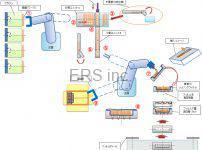
動作フロー
- コンベアーからプリント済基盤(ワーク)搬入
- 定位置でコンベアー停止
- プッシュシリンダーでコンベアーからワークを押し出しロボットの搬送プレートに載せる
- 挿入位置に移動(整列位置が異なるため、位置決めは治具で調節)
- ロボットハンドが回転し搬送部レートを斜めに傾ける
- 背面板が上がり基盤(ワーク)を乾燥炉スチールメッシュコンベアーに滑り下ろす
- 背面版が閉じ最初の挿入位置に移動
納期目安
- 受注後:2ヶ月~