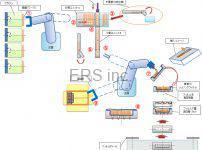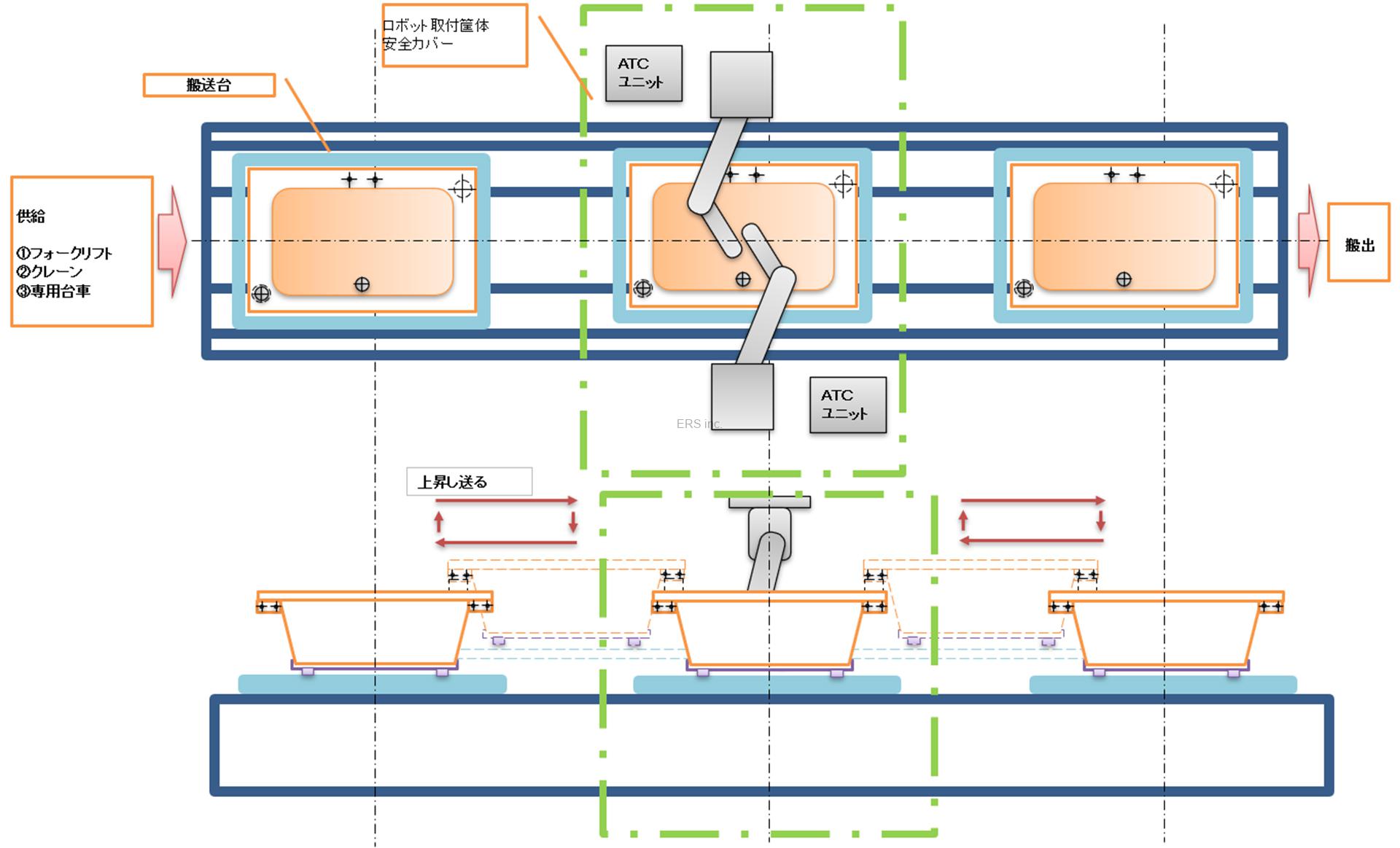
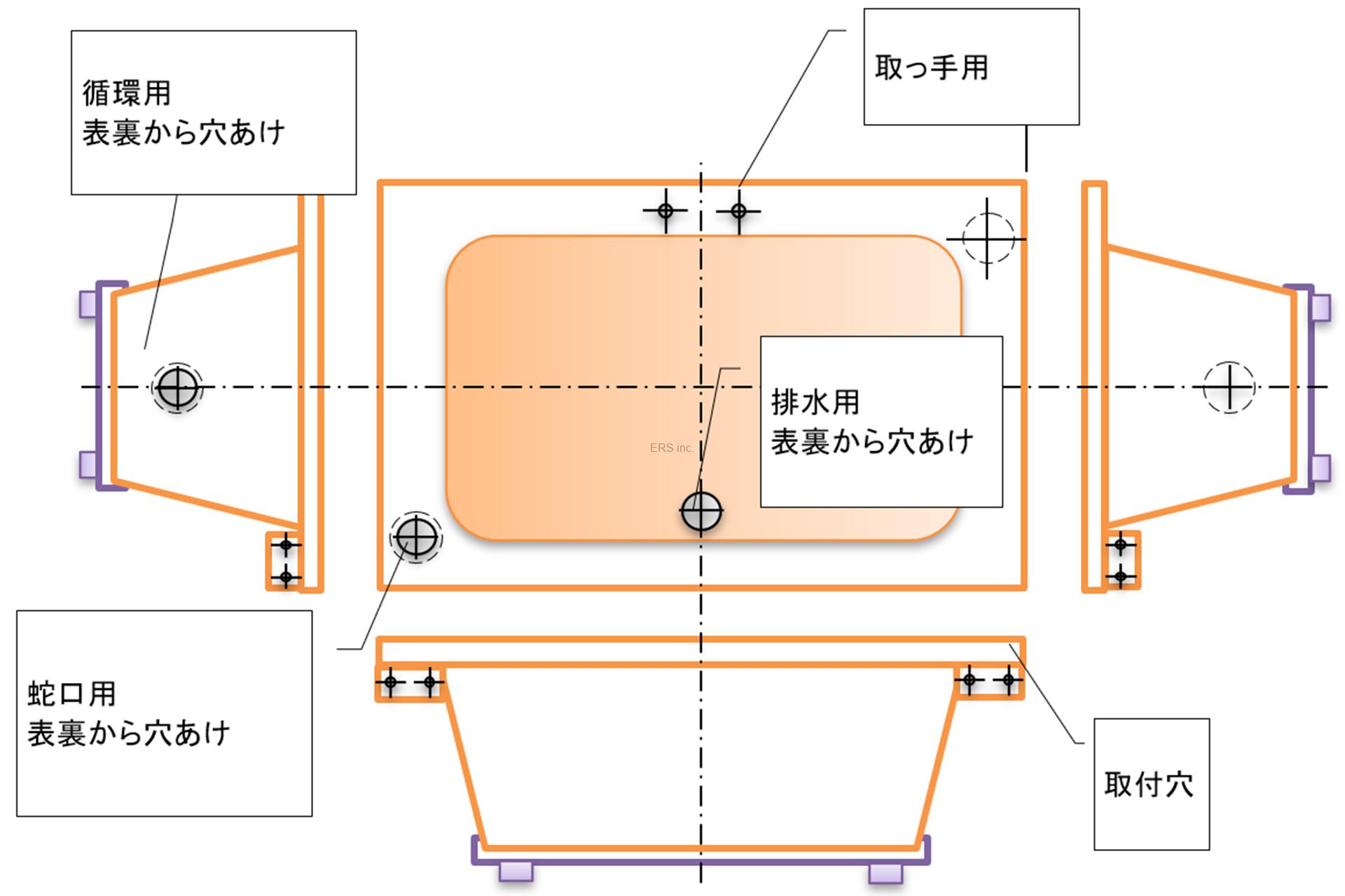
浴槽の穴あけ加工をロボット、コンベアー等の仕様で作業者の負担を軽減させるシステムです。
ポイント
- 浴槽の投入、払出しは手動で行なう以外、自動で作業する
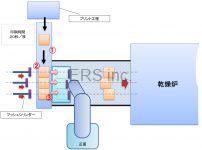
- コンベアーに昇降ユニットを追加する事により可動範囲以外でも加工が可能
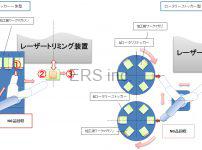
- ATCシステムにより、多種の穴径加工に対応可能
構成ユニット
| ユニット名 | 個数 | 備考 |
| 搬送レール | 1 | |
| ロボット | 2 | エアーブロー機構付 |
| スピンドル | 2 | |
| ATCシステム | 2 | |
| ツール | 10 | |
| ロボット取付筐体 | 1 | |
| 安全カバー | 1 | |
| 電装盤 | 1 | |
| 操作BOX | 1 |
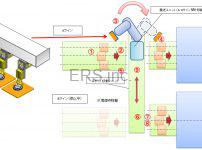
動作フロー
- 浴槽を搬送台に乗せる
- 搬送台が上昇し加工部分まで送る
- 下降し浴槽を固定する
- 2台のロボットが穴加工を開始する
- 下からドリルユニットが穴加工する
- 穴加工後、エアーブローをする
- 固定を解除し、搬送台が上昇する
- 搬送台が移動し搬出部に持って行く
- 取出し
納期目安
- 受注後4ヶ月~