ロボットを2台使用し、マガジン供給からのワーク(基板)を細分割、定数でシュリンクパック後、梱包するシステムです。
特長
マガジンから分割ユニットへの搬送ロボットと分割した基板をパッケージングするロボットの2台を組み合わせることにより作業の簡略化が可能。
構成ユニット
| ユニット名 | 個数 | 備考 |
| ロボット本体 | 2 | |
| 筐体(ロボット台) | 2 | |
| ロボットハンドチャック | 3 | |
| 分割ユニット | 2 | |
| パッケージユニット | 1 | |
| 制御ボックス | 1 | |
| 制御パネル | 1 | |
| 安全柵 | 2 |
動作フロー
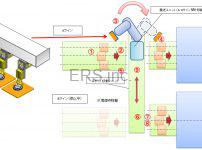
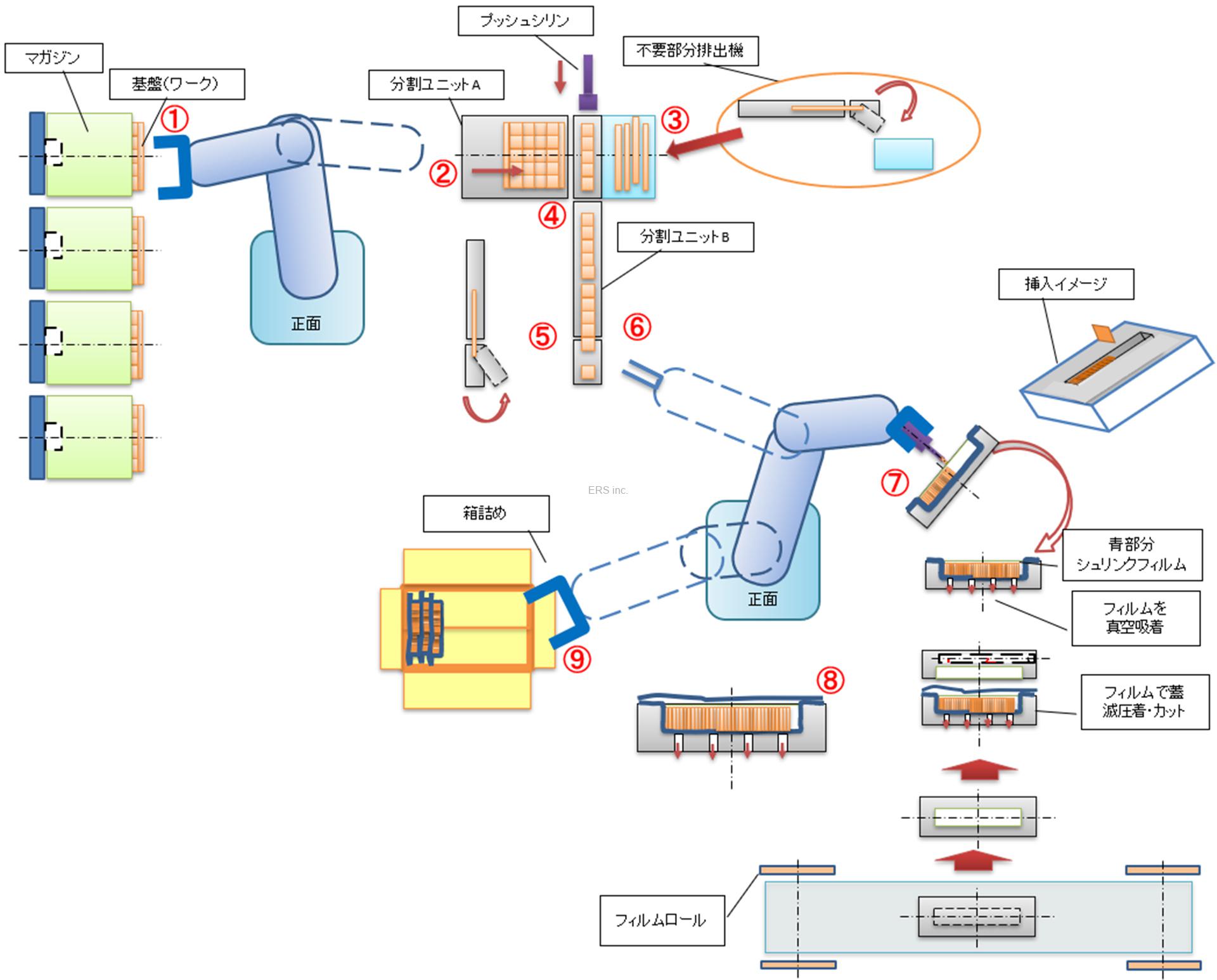
※赤丸番号:作動フロー順
※①~⑤:ロボットA動作、⑥~⑨:ロボットB動作
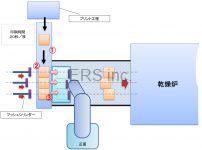
- マガジンから基盤(ワーク)をピックアップ
- 分割ユニットAに挿入
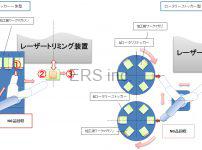
- ピッチングでワークを送り出し4分割(耳の部分はそのまま排出)
- プッシュシリンダーで分割したワークを送り出し分割ユニットBに搬入
- ピッチングでワークを送り出し5分割
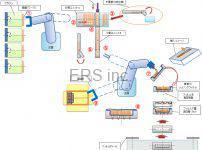
- 5分割された基盤(ワーク)をピッキング
- パッケージユニットに挿入。(ユニット内ケースにはシュリンクフィルムが吸着済)
- ケースにワークがいっぱいになると、ユニットがスライドしシュリンクフィルムで蓋をし圧着パッケージング
- パッケージング完了品を箱詰め
納期目安
- 受注後:3.5ヶ月~