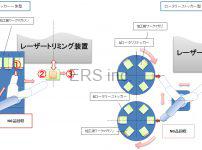
ストッカーからトリミング装置への搬入搬出をロボットにより自動化するシステムです。
特長
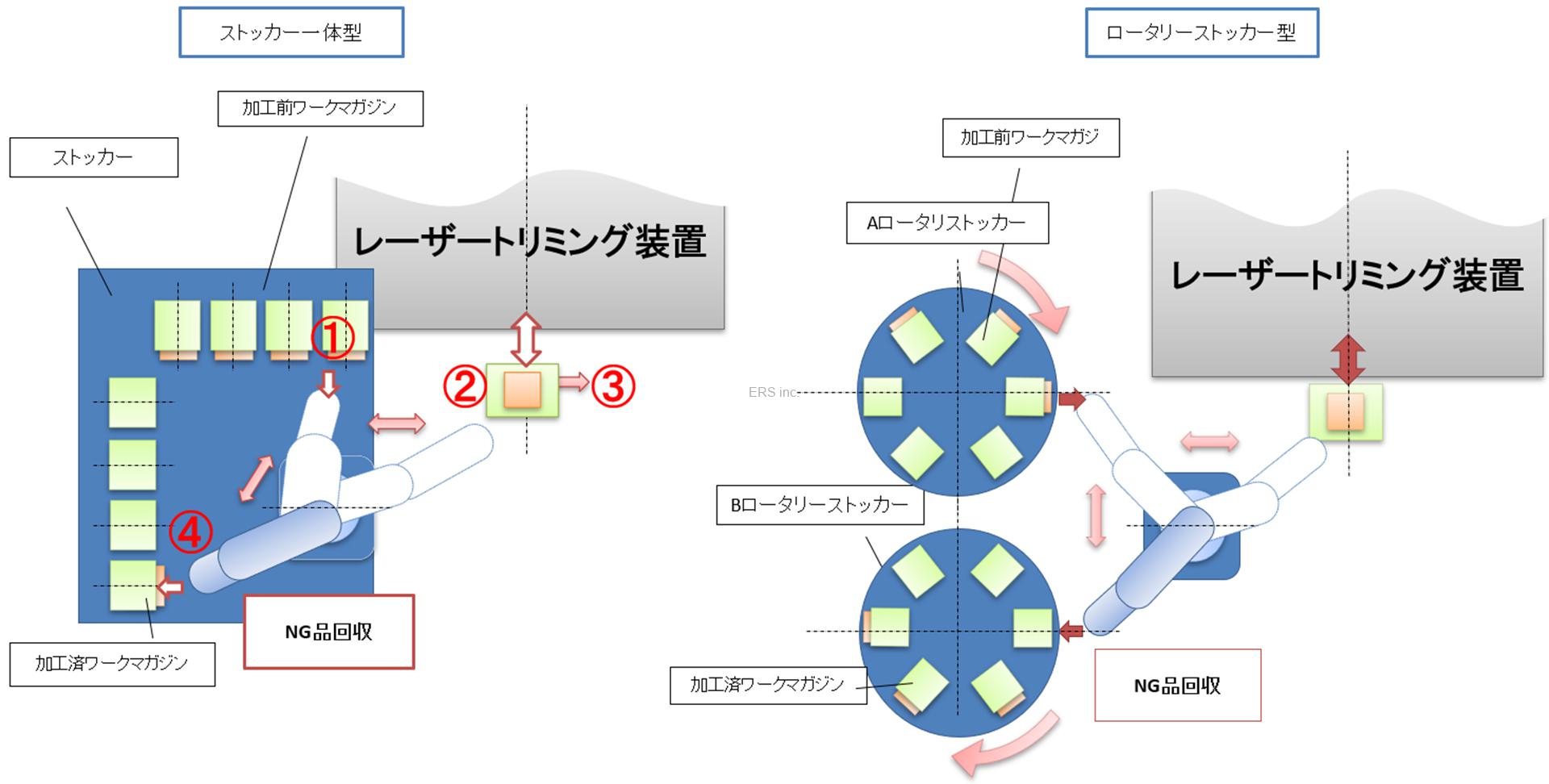
- 固定式マガジンストッカー又はロータリーストッカーでの装置へのワーク(基板)供給を 生産量により選択が可能
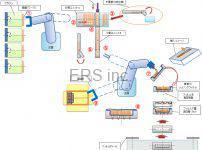
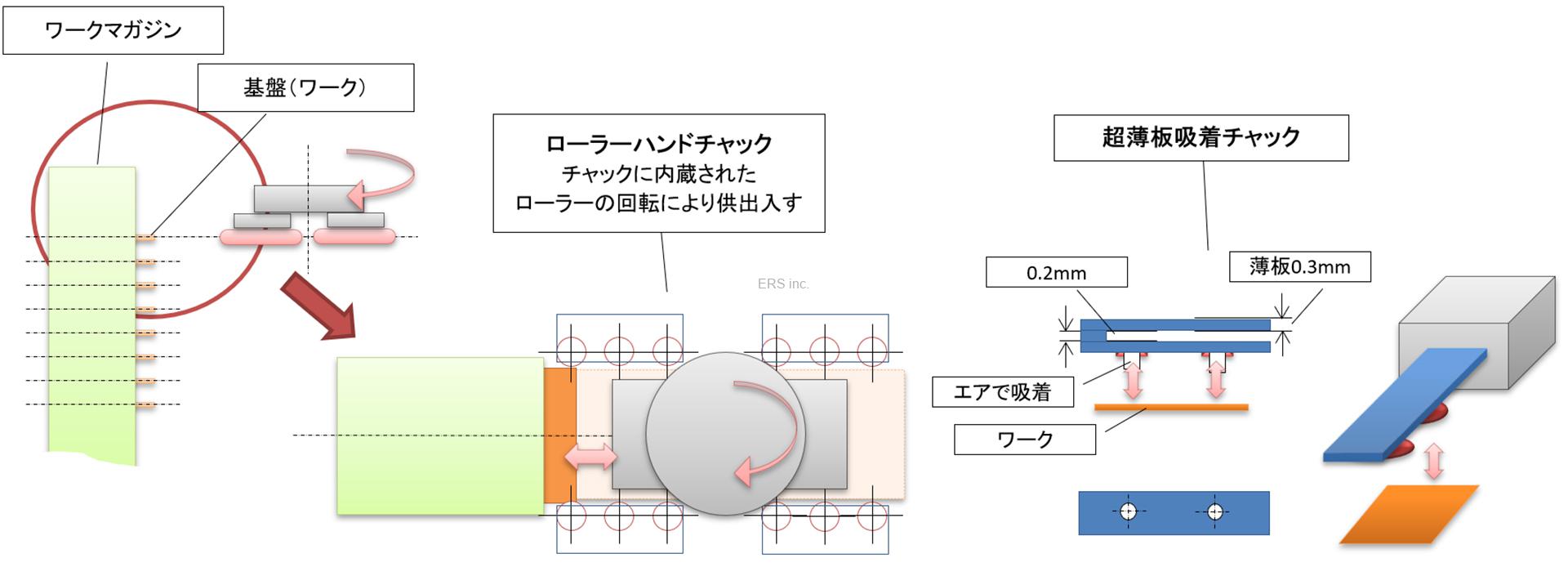
- 超薄型吸着チャックにより、ピッチサイズが短いマガジンでの基板の挿入取りだしが可能
構成ユニット
| ユニット名 | 個数 | 備考 |
| ロータリーストッカー | 2 | |
| ロボット本体 | 1 | |
| 筐体(ロボット台) | 1 | |
| ロボットハンドチャック | 1 | |
| 制御ボックス | 1 | |
| 制御パネル | 1 | |
| 安全柵 | 1 |
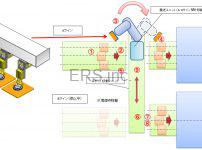
動作フロー
※赤丸番号:作動フロー順
- Aストッカー上のマガジンから基盤(ワーク)を引き出す
※1マガジン引き出し終えたらストッカーが回転し次のマガジンへ) - レーザートリミング装置にワークを挿入
- トリミング終了後、装置から取り出し
- Bストッカー上の空きマガジンに挿入
※不良品の場合はNG品回収BOXに投入
※1マガジン挿入終えたらストッカーが回転、次のマガジンへ
納期目安
- 受注後:3ヶ月~