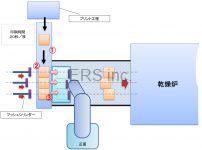
コンベアーラインから基板を吸着し、ロボットが左右に移動して2つの乾燥炉のラインに搬送すすシステムです。
特長
- 多列の吸着ヘッドにより複数の基板の搬送が可能
- 吸着チャックを移動させることにより、基板の搬送位置を変更できる
- 移動レールを使うことによりロボットの可搬範囲が広くなり、複数のラインに搬送可能
構成ユニット
| ユニット名 | 個数 | 備考 |
| ロボット本体 | 1 | |
| ロボット搬送ユニット | 1 | |
| 吸着ユニットハンド | 1 | |
| 制御ボックス | 1 | |
| 制御パネル | 1 | |
| 安全柵 | 1 |
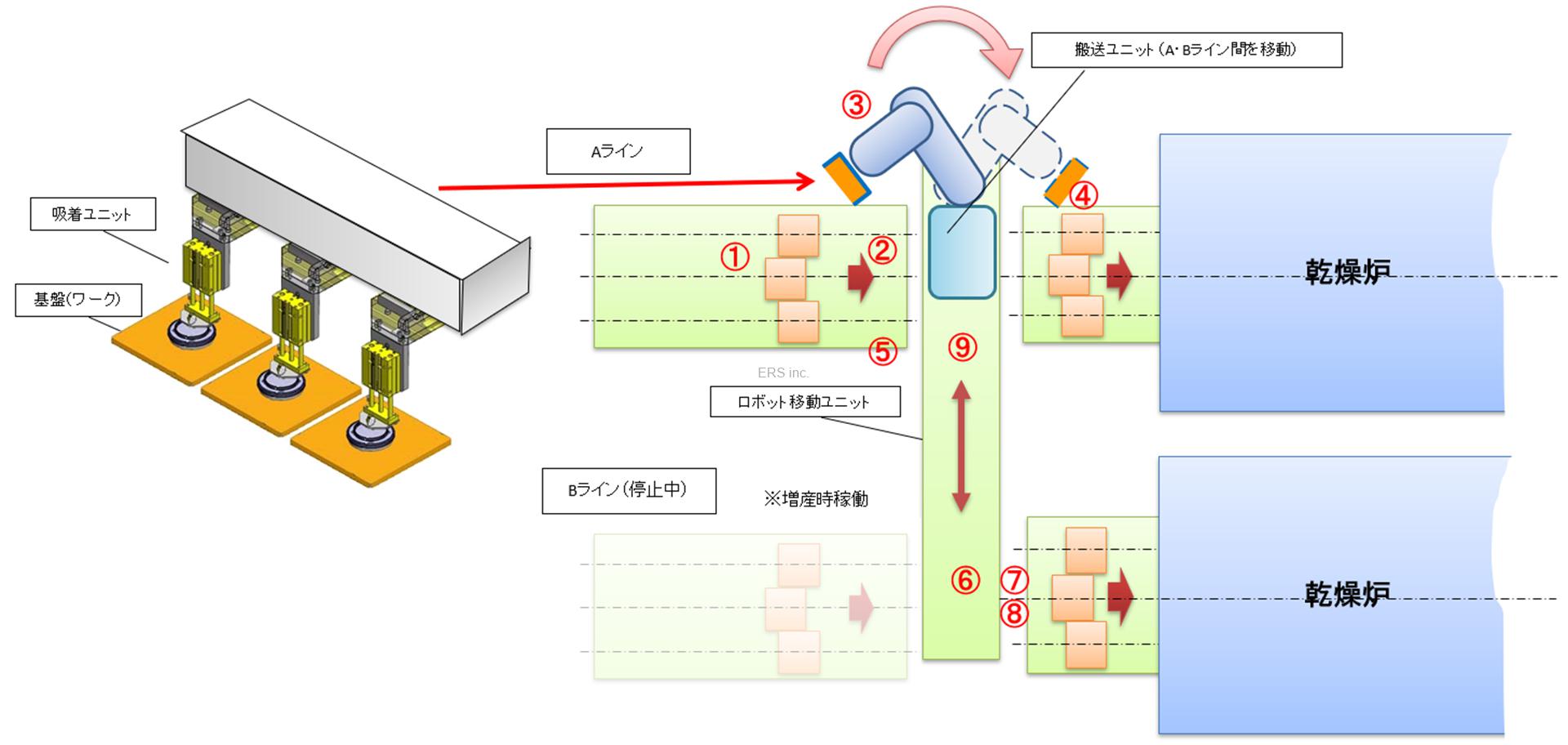
動作フロー
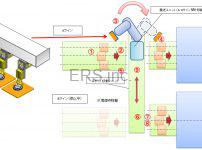
※赤丸番号:作動フロー順
- Aラインコンベアーから基盤(ワーク)3枚搬入
- コンベアー定位置で停止
- 吸着ユニット付きロボットアームで3枚同時に吸着
- 180°回転しAラインの乾燥炉用コンベアーに搬入
- Aラインコンベアーから基盤(ワーク)3枚搬入
- コンベアー定位置で停止
- ロボット移動ユニットでBライン乾燥炉用コンベアー前に移動
- 180°回転しBラインの乾燥炉用コンベアーに搬入
- ロボットAラインに移動
納期目安
- 受注後:2ヶ月~